




















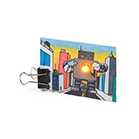








































































The Zumo robot is a low-profile tracked robot platform intended for use with an Arduino (or compatible device) as its main controller. It measures less than 10 cm on each side and weighs approximately 300 g with an Arduino Uno and batteries (165 g without, as shipped), so it is both small enough and light enough to qualify for Mini-Sumo competitions. It uses two 75:1 HP micro metal gearmotors to drive the treads, providing plenty of torque and a top speed of approximately 2 feet per second (60 cm/s), which makes it much more agile than competing robots while still offering plenty of control.
The Zumo robot includes a 0.036"-thick laser-cut stainless steel sumo blade mounted to the front of the chassis for pushing around objects like other robots, and a reflectance sensor array mounted along the front edge of the Zumo (behind the sumo blade) allows the Zumo to detect features on the ground in front of it, such as lines for following or edges for avoiding.
The Zumo control board is essentially a shield for the Arduino Uno or Leonardo, both of which can be plugged directly into the shield's male header pins, face down. (It is not compatible with the Arduino Mega or Due, but it can be used with older Arduinos that have the same form factor as the Uno, such as the Duemilanove.) The shield includes dual motor drivers, a buzzer for playing simple sounds and music, a user pushbutton, and a 3-axis accelerometer and compass. It also boosts the battery voltage to power the Arduino and breaks out the Arduino I/O lines, reset button, and user LED for convenient access and to accommodate additional sensors.
The Zumo Arduino libraries make it easy to interface with all of the integrated hardware. Sample programs are provided to show how to use the Zumo's reflectance array, pushbutton, buzzer, and motors. The LSM303 Arduino library makes it easier to interface with the LSM303D 3-axis accelerometer, magnetometer and L3GD20H 3-axis gyro.
The robot ships as shown in the main product picture; no assembly or soldering is required. An appropriate Arduino (or compatible controller) and four AA batteries are required but not included.
Features:
- Integrated 75:1 HP micro metal gearmotors that offer a good blend of speed (up to 2 feet per second), power, and control.
- Mounted array of six IR reflectance sensors that allows the Zumo to detect contrasts in reflectivity directly beneath its blade, which can be used for following lines or detecting edges (e.g. the white outer area of a sumo ring or the edge of a table).
- Integrated DRV8835 dual motor drivers capable of delivering enough current for the Zumo's two high-power gearmotors.
- Piezo buzzer for playing simple sounds and music. The buzzer is controlled by one of the Arduino's PWM outputs, so tones can be generated in the background without taking up a lot of processing power.
- Integrated LSM303D 3-axis accelerometer and 3-axis magnetometer that can be used to detect impacts. The compass gets a lot of interference from the motors, batteries, PCB, and its surroundings, so it is not generally useful for precision navigation, but we have found that, with proper calibration, it can be used as a rough indication of orientation in many environments.
- Integrated L3GD20H 3-axis gyroscope that can be used to track rotation.
- Optional user pushbutton on pin 12.
- 7.5 V boost regulator for powering the Arduino from the Zumo's 4 AA batteries.
- Convenient access to Arduino I/O lines, the pin 13 user LED, and the Arduino reset line via the shield.
- General-purpose prototyping areas and an expansion area at the front for connecting additional sensors.
- Compatible with the Arduino Uno R3 and Arduino Leonardo. Can also be used with older Arduinos that have the same form factor, like the Duemilanove.
- Arduino libraries and sample code make getting started easy.
- Detailed user's guide.
Dimensions:
- Size: 98mm × 98mm × 39mm (with an Arduino Uno)
- Weight: 165g (~300g with batteries and an Arduino Uno)
Documents:
Related products









Customers also bought


























 Pricing Currency
Pricing Currency We ship internationally
We ship internationally Real-time stock
Real-time stock Price before GST
Price before GST (65)6570 1125
(65)6570 1125